
0x00 引言
强化学习是机器学习的一个分支,目前应用比较广泛的强化学习方法有AHC、TD以及Q-learning、sarsa、H-learning、DQN等[1]。
连接主义学习理论是心理学学习理论的一种,其将学习的方式分类为有监督学习、无监督学习和强化学习。
监督学习是人工标记输出,并反馈修改神经网络权值的学习方法。无监督学习需要机器对给定的输入自行聚类。而强化学习则是机器主动做出试探动作,并根据环境的反馈来修改行为的学习方式。
本文主要介绍在强化学习中使用最多的基础算法,即Q-learning。
0x01 Q-learning算法
q-learning算法[2]包含两个最主要的概念,即状态S(state)和动作A(action),每次通过选择动作更新状态时,要同时按照图中的最优值函数Q计算公式更新Q表。其中参数α称为学习率,其决定这次的误差有多少是要被学习的, 且α是一个小于1 的数。γ为折扣率,是对未来 reward 的衰减值,值在[0,1]选择。
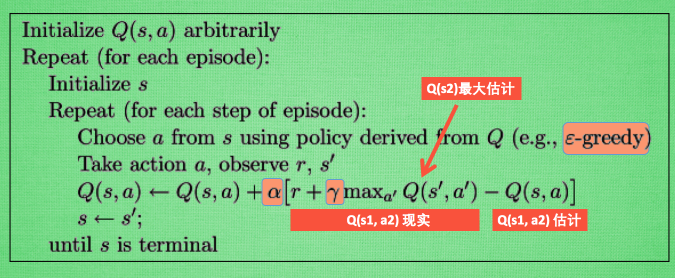
在强化学习中,如果已经估计出最优值函数Q,则有三种动作选择方式[1]:贪婪动作选择策略(greedy)、ε-贪婪动作策略(ε-greedy)和softmax策略。第一种策略总是选择最高Q值的下步动作,第二种策略有ε的概率选择最高Q值,(1-ε)的概率任意选择动作,第三种策略根据各动作的Q值权重来选择动作。
在了解基础的算法以后,分析一个实际问题[3],例子描述了如何利用q-learning来学习未知环境并训练agent。
0x02 实例分析
现在分析一下莫烦视频[4]中的代码段,代码[5]可从github上获得。该例子的内容,是移动一个圆点,使其学会以最快的速度从左侧移动至右侧。
1 | def build_q_table(n_states, actions): |
函数build_q_table旨在新建一个6行2列的Q值表,行代表状态,列代表左右移动。
1 | def choose_action(state, q_table): |
该例子采用ε-greedy策略来选择动作,choose_action即根据ε值选择下一步的实际动作,有90%的机率选择最大的Q值动作,其余10%的机率随机选择其他动作
1 | def get_env_feedback(S, A): |
函数get_env_feedback的作用是假设按照已选择完成的动作行动,则下一状态的环境是否到达最左或最右,若是,则采取相应措施,若不是,则判断可安全执行。
1 | def rl(): |
函数update_env是在搭建环境,这里不赘述。函数rl则是执行函数,循环做选择动作、判断环境、更新Q表以及实际运行动作的过程。
0x03 引用文献
[1]强化学习方法及其应用研究
[2]https://morvanzhou.github.io/tutorials/machine-learning/reinforcement-learning/2-2-A-q-learning/
[3]http://mnemstudio.org/path-finding-q-learning-tutorial.htm
[4]https://www.bilibili.com/video/av16921335/?p=6
[5]https://github.com/MorvanZhou/Reinforcement-learning-with-tensorflow/blob/master/contents/1_command_line_reinforcement_learning/treasure_on_right.py